
Pilotes de moteur pas à pas
Différents types de pilotes de moteurs pas à pas (ou drivers) existent : A4988, drv8825, TMC21000. Mais à quoi servent-ils, comment fonctionnent-ils, comment doit-on les régler, quelles sont les différences entre eux ?

Rôle :
Les drivers ou pilotes de moteurs pas à pas, permettent de contrôle la rotation d’un moteur pas à pas, en fonction des instructions reçues par l’électronique de pilotage. Pour le cas d’une imprimante 3D, l’ensemble Arduino Mega + Shield Ramps 1.4 ou l’équivalent sur une carte tout-en-un comme la MKS ou la Trigorilla.
Fonctionnement :
Les modules pilotent les bobines des moteurs pas à pas (4 fils et 2 bobines pour les moteurs utilisés en impression 3D), ils gèrent la rotation angulaire de ces moteurs et améliorent même leur précision par la création de pas intermédiaires.
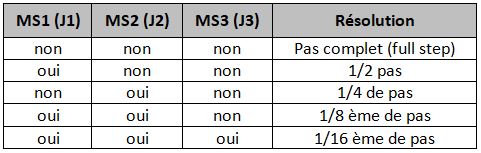
Par exemple : le A4988 permet d’augmenter la précision par des rapports de 1, 1/2, 1/4, 1/8 ou 1/16ème de pas, ces rapports sont différents selon les drivers, le paramétrage de ce rapport ce fait par des cavaliers ou des switchs sur la carte de contrôle.
Nous verrons plus précisément le fonctionnement d’un moteur pas à pas dans un prochain article, ci-dessous la représentation de principe d’un moteur 2 phase 4 pôles, les moteurs pas à pas, même avec 2 bobines ont bien plus de pôles ce qui leur permet de prendre un grand nombre de de positions angulaires.

Câblage :
Tension et intensité d’alimentation des moteurs :
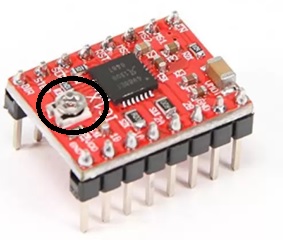
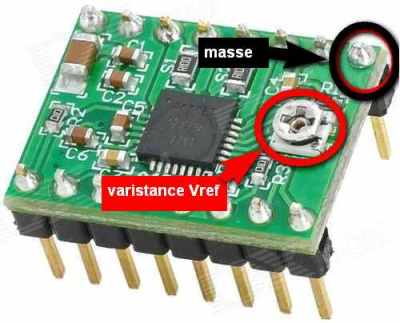
Le potentiomètre présent sur le driver permet de régler le courant d’alimentation du moteur. L’intensité délivrée par le driver détermine le couple que pourra générer le moteur pas à pas.
Il est souvent possible de laisser ce réglage par défaut, mais il est mieux de l’optimiser. Le courant, et donc le couple par défaut peut être insuffisant, ce qui génèrera des sauts de pas lors d’accélérations ou de mouvements rapides. Ou le courant peut être trop élevé ce qui génèrera une chauffe, voir une surchauffe des drivers et des moteurs, pouvant la aussi causer des sauts de pas et même la détérioration des drivers et/ou des moteurs.
Comment les régler :
Sans aborder la résistance internet des phases et autres paramètres, on peut simplement considérer le réglage ainsi :
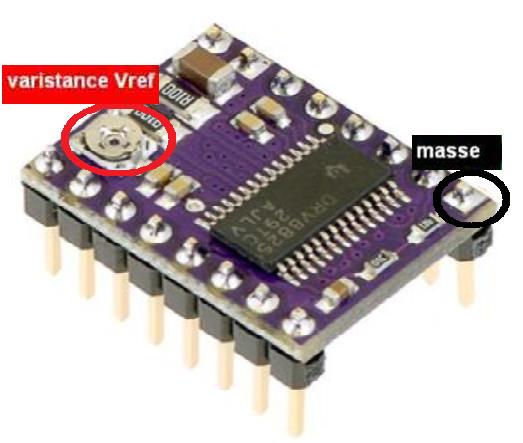
Sur le driver lui-même c’est la tension de référence ou Vref que l’on peut régler sur le potentiomètre, chaque driver indiquant la correspondance entre intensité et tension de référence par la formule : I = Vref x Coef
Par exemple : Pour un A4988 la formule qui les lies est : Intensité = Vref x 2.5.
Selon les fiches techniques des drivers, la valeur de réglage dépend de la sélection des pas intermédiaires, il est optimal en pas plein et se caractérise par la formule Inominal = 70% de Imax, mais a priori, il diminue en fonction du rapport des pas intermédiaires (1/4, 1/8, 1/16, …). Pas d’information plus précise pour l’instant sur les différents réglages, le sujet reste à creuser.
Attention pour le réglage : utiliser de préférence un tournevis en céramique qui évitera de créer de court-circuit et de parasiter le driver lors du réglage.
Présentation de 3 différents drivers :
Voyons à présent plus en détail les 3 types de drivers les plus rencontrés en impression 3D : A4988, DVR8825 et TMC2100.
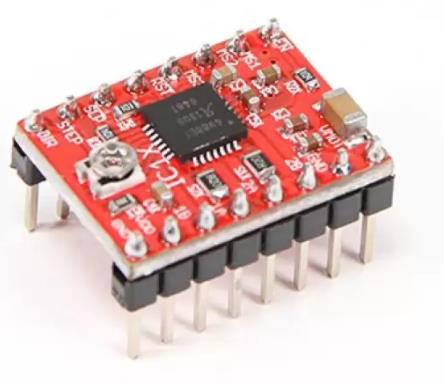
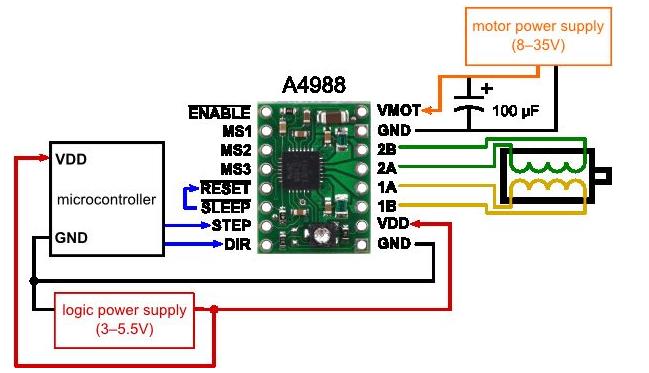
- Driver A4988 :
Lien page Wiki, Fiche Technique
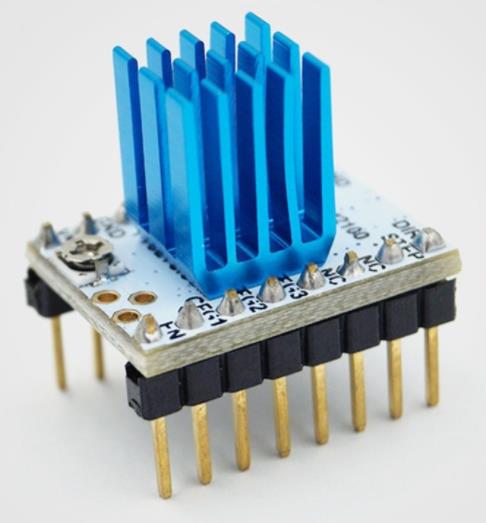
- Photo :
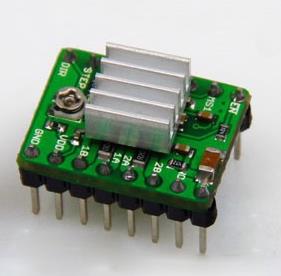
- Caractéristiques :
- Résolution de pas : 1 à 1/16,
- Intensité Max : 2A,
- Alimentation driver : 3 à 5.5 V,
- Alimentation moteur : 8 à 35 V.
- Prix :
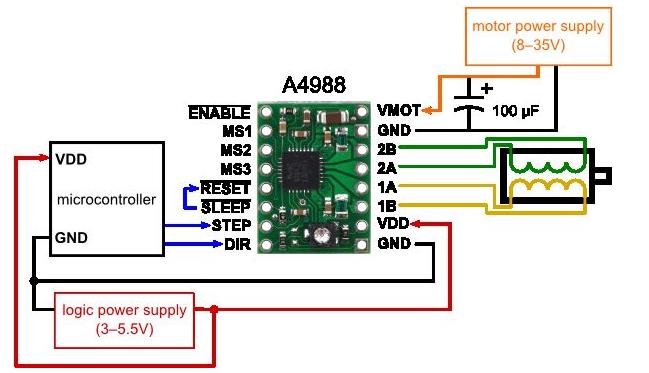
0.58 € chez Aliexpress, - Brochage :

- Enable: Logique Inversée, permet d'activer ou désactiver le moteur. Etat Haut=High=Moteur actif... et axe bloqué entre les pas. Etat bas=Low=Axe totalement libre,
- MS1, MS2, MS3: permet de sélectionner la configuration Step/MicroStep. Ces broches disposent de résistances Pull-Down ramenant le potentiel à 0v lorsque rien n'est connecté sur ces broches,
- Reset: Logique inversée. Permets de faire une réinitialisation du module. Généralement connecté sur la broche "sleep",
- Sleep: Logique inversée. Généralement connecté sur la broche "Reset" du module,
- Step: Envoyer un signal d'horloge (Niveau Haut puis Niveau bas, High puis Low) pour avancer le moteur d'un pas,
- DIR: Permet d'indiquer la direction de rotation du moteur. Etat Haut=High pour tourner dans un sens, Etat bas=Low pour tourner dans l'autre sens,
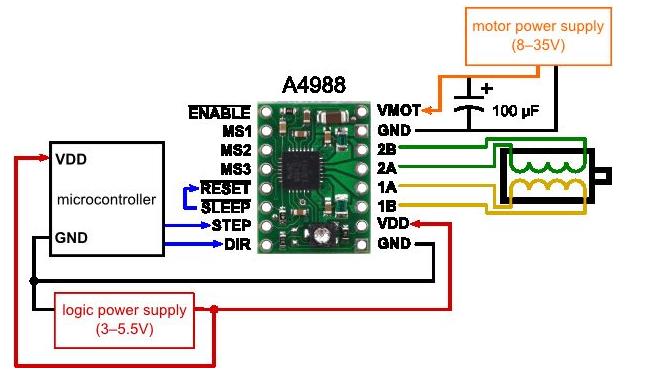
- VMot: Tension d'alimentation du moteur. Habituellement 12V pour les moteurs pas à pas. Tension entre 8 et 12v,
- GND: Sous "VMOT", masse pour l'alimentation moteur. Habituellement mise en commun avec la masse de logique de commande (celle sous "VDD"),
- 2B 2A: Première bobine du moteur pas à pas bipolaire (voir exemple ci-dessous),
- 1A 1B: Deuxième bobine du moteur pas à pas bipolaire (voir exemple ci-dessous,
- VDD: Alimentation de la logique de commande entre 3 et 5.5v. Habituellement 5V,
- GND: Sous "VDD", masse de la logique de commande. Souvent mise en commun avec la masse d'alimentation du moteur.
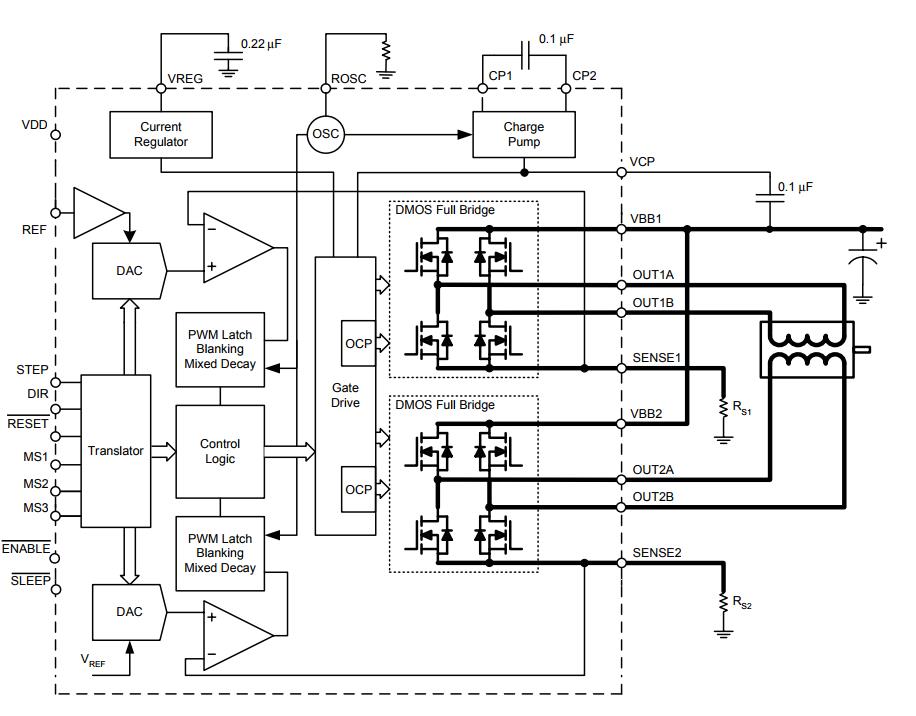
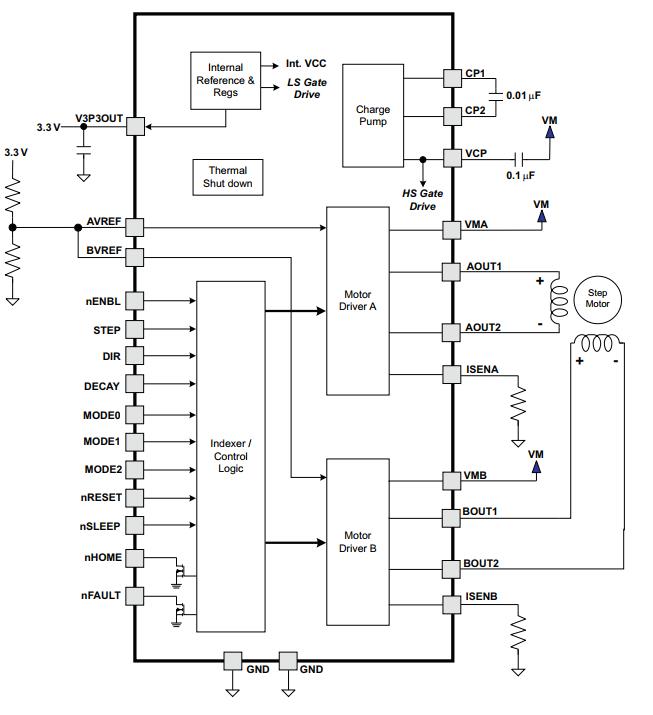
- Schéma :
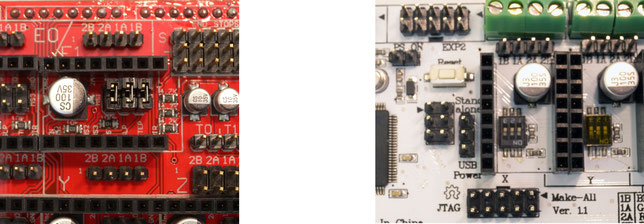
- Câblage :
- Réglage step :
Position des cavaliers / switchs

- Réglage Vref :
Vref = Imax / 2.5,
Inominal est de 70% du Imax, soit Imax = Inominal / 0.7,
Vref = (Inominal / 0.7)/ 2.5
Soit pour un Nema 17HS4401 : Vref = (1.7 / 0.7)/2.5 = 0.97 V

-
Chaleur :
Radiateur obligatoire et ventilation facultative, toutefois je la recommande. C’est toujours râlant d’avoir des décalages après 4 heures d’impression sur une grosse pièce lorsque les drivers sont chauds,
-
Bruit :
Très bruyants, sifflement et vibration des moteurs, directement lié au réglage d’intensité.
- Photo :
-
Driver DRV8825 :
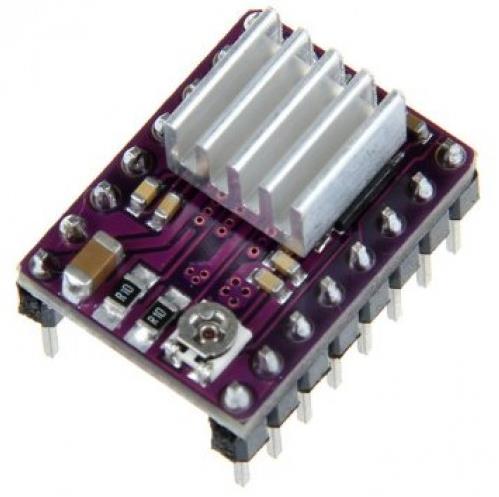
- Photo :
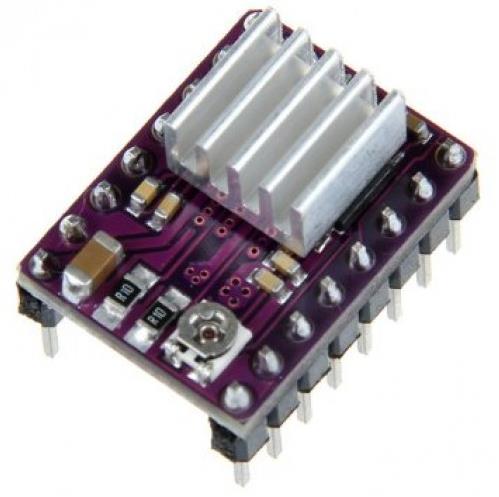
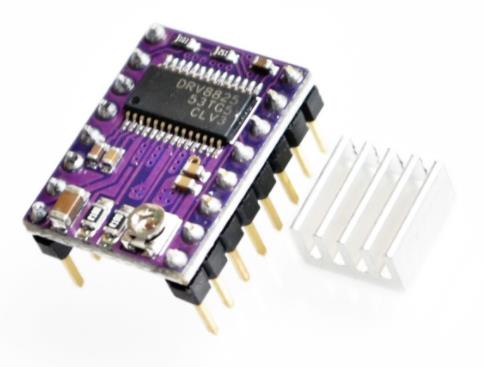
- Caractéristiques :
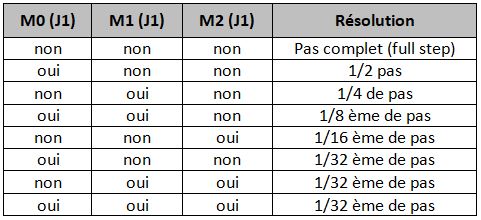
- Résolution de pas : 1 à 1/32,
- Intensité Max : 2.2A,
- Alimentation driver : 2.5 à 5.25 V,
- Alimentation moteur : 8.2 à 45 V.
- Prix :
0.89 € chez Aliexpress,
- Brochage :
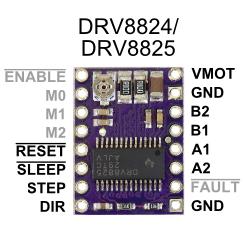
- Enable: Logique Inversée, permet d'activer ou désactiver le moteur. Etat Haut=High=Moteur actif... et axe bloqué entre les pas. Etat bas=Low=Axe totalement libre,
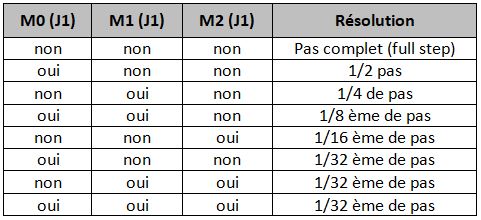
- M0, M1, M2: permet de sélectionner la configuration Step/MicroStep. Ces broches disposent de résistances Pull-Down ramenant le potentiel à 0v lorsque rien n'est connecté sur ces broches,
- Reset: Logique inversée. Permets de faire une réinitialisation du module. Généralement connecté sur la broche "sleep",
- Sleep: Logique inversée. Généralement connecté sur la broche "Reset" du module,
- Step: Envoyer un signal d'horloge (Niveau Haut puis Niveau bas, High puis Low) pour avancer le moteur d'un pas,
- DIR: Permet d'indiquer la direction de rotation du moteur. Etat Haut=High pour tourner dans un sens, Etat bas=Low pour tourner dans l'autre sens,
- VMot: Tension d'alimentation du moteur. Habituellement 12V pour les moteurs pas à pas. Tension entre 8 et 12v,
- GND: Sous "VMOT", masse pour l'alimentation moteur. Habituellement mise en commun avec la masse de logique de commande (celle sous "VDD"),
- 2B 2A: Première bobine du moteur pas à pas bipolaire (voir exemple ci-dessous),
- 1A 1B: Deuxième bobine du moteur pas à pas bipolaire (voir exemple ci-dessous,
- VDD: Alimentation de la logique de commande entre 2.5 à 5.25V. Habituellement 5V,
- GND: Sous "VDD", masse de la logique de commande. Souvent mise en commun avec la masse d'alimentation du moteur.
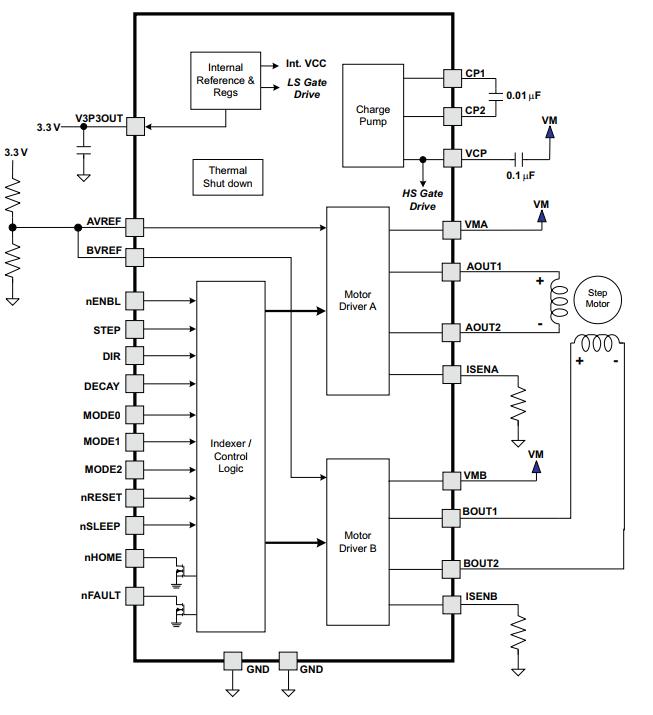
- Schéma :
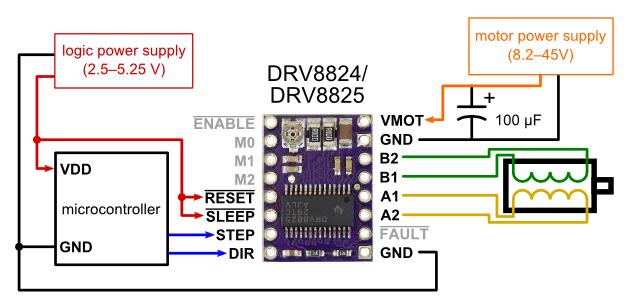
- Câblage :

- Réglage step :
- Réglage Vref :
Vref = Imax / 2,
Inominal est de 70% du Imax, soit Imax = Inominal / 0.7,
Vref = (Inominal / 0.7)/ 2
Soit pour un Nema 17HS4401 : Vref = (1.7 / 0.7)/2 = 1.2 V

-
Chaleur :
Tout comme les A4988 : radiateur obligatoire et ventilation facultative, toutefois je la recommande. C’est toujours râlant d’avoir des décalages après 4 heures d’impression sur une grosse pièce lorsque les drivers sont chauds,
-
Bruit :
Très bruyants, sifflement et vibration des moteurs, directement lié au réglage d’intensité.
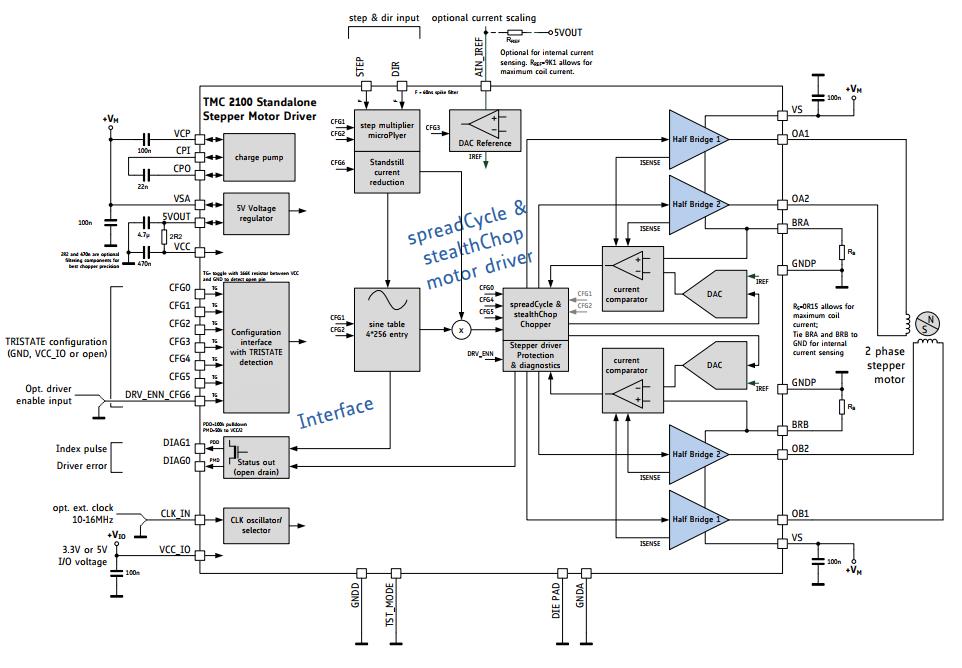
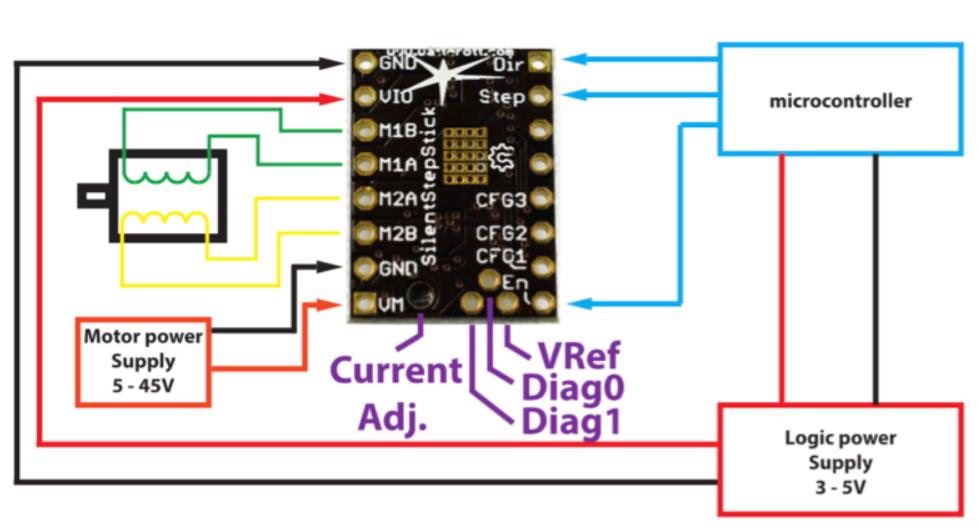
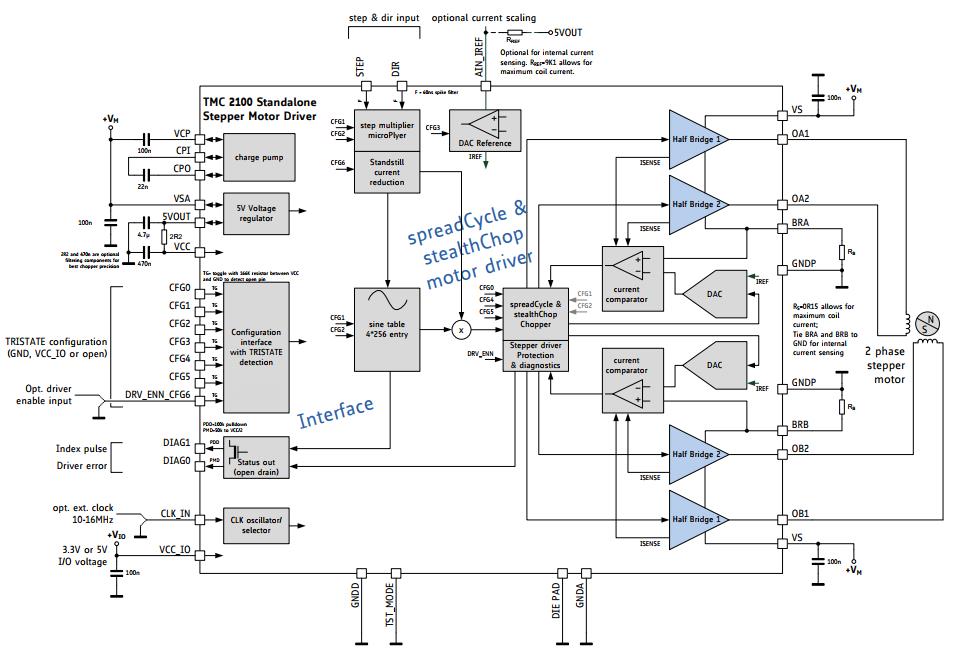
- TMC2100 :
Lien page Wiki, Fiche Technique
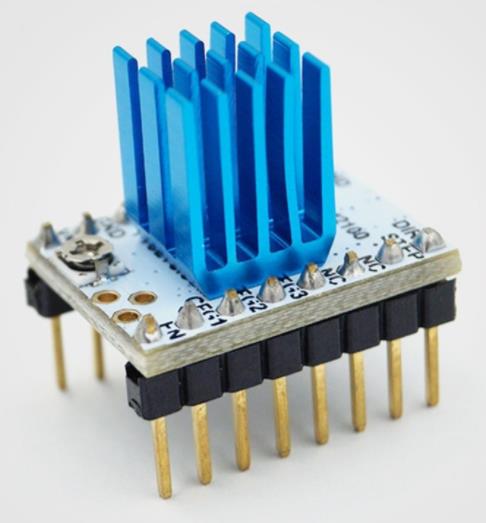
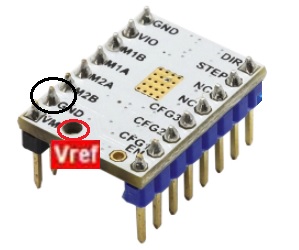
- Photo :

- Caractéristiques :
- Résolution de pas : 1 à 1/16,
- Intensité Max : 2.5 A,
- Alimentation driver : 3 à 5 V,
- Alimentation moteur : 5 à 45 V.
- Prix :
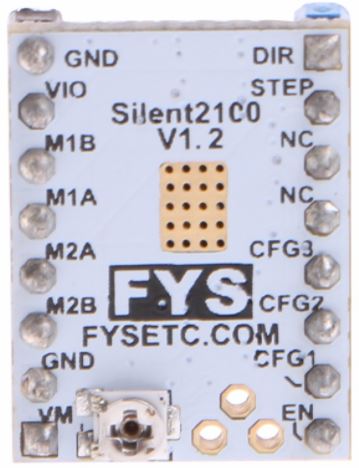
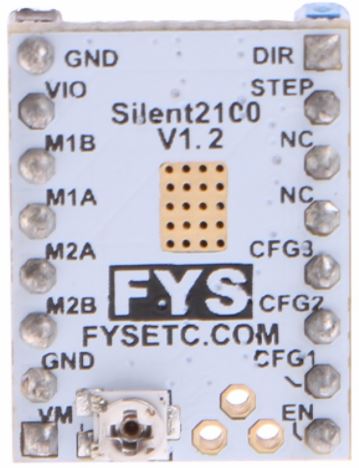
5.51 € chez Aliexpress, - Brochage :
- Enable: Logique Inversée, permet d'activer ou désactiver le moteur. Etat Haut=High=Moteur actif... et axe bloqué entre les pas. Etat bas=Low=Axe totalement libre,
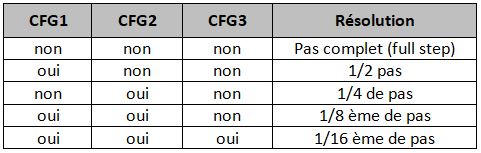
- CF1, CF2, CF3 : permet de sélectionner la configuration Step/MicroStep. Ces broches disposent de résistances Pull-Down ramenant le potentiel à 0v lorsque rien n'est connecté sur ces broches,
- Step: Envoyer un signal d'horloge (Niveau Haut puis Niveau bas, High puis Low) pour avancer le moteur d'un pas,
- DIR: Permet d'indiquer la direction de rotation du moteur. Etat Haut=High pour tourner dans un sens, Etat bas=Low pour tourner dans l'autre sens,
- VMot: Tension d'alimentation du moteur. Habituellement 12V pour les moteurs pas à pas. Tension entre 8 et 12v,
- GND: Sous "VMOT", masse pour l'alimentation moteur. Habituellement mise en commun avec la masse de logique de commande (celle sous "VDD"),
- 2B 2A: Première bobine du moteur pas à pas bipolaire (voir exemple ci-dessous),
- 1A 1B: Deuxième bobine du moteur pas à pas bipolaire (voir exemple ci-dessous,
- VIO: Alimentation de la logique de commande entre 3.3 à 5V. Habituellement 5V,
- GND: Sous "VDD", masse de la logique de commande. Souvent mise en commun avec la masse d'alimentation du moteur.
-
Particularité :
Attention, la position du potentiomètre est inversée par rapport aux autres drivers, si l’on se réfère à lui, le montage est inversé, - Schéma :
- Câblage :
- Réglage step :

- Réglage Vref :
Pour ce driver le calcul est le même que les autres ce qui amène pour un Nema 17HS4401 à un Vref de 2.4 V.
Soyons clair, c’est beaucoup trop. A 2.4V le driver dépasse 150°C en un temps record.
Pour ma part j’ai réglé de manière empirique à 1.2V. A ce réglage, le driver ne chauffe pas excessivement et le couple du moteur est suffisant. Il faut toutefois limiter l’accélération dans Marlin pour ne pas risquer de perdre des pas. Par exemple : 700 contre 3000 à l’origine, c’est sans impact sur le temps d’impression et les mouvements sont moins brusques.

-
Chaleur :
C’est le point faible de ces drivers, ils chauffent énormément et peuvent dépasser 150°C en fonctionnement.
Cette forte température n’est pas sans conséquence et génère très rapidement des pertes de pas et donc de gros décalages lors des impressions.
Il est indispensable de les refroidir avec un ventilateur, les radiateurs ne suffisent pas.
-
Bruit :
C’est le GROS AVANTAGE de ces drivers, ils sont presque inaudibles, les moteurs ne sifflent pas et ne vibrent pas, c’est le jour et la nuit en comparaison des A4988 ou des DRV8825.
Personnellement j’ai choisi ces drivers pour équiper mes imprimantes. Le surcoût et l’obligation de les ventiler sont très largement compensés par le silence et l’absence de vibrations.
- Photo :







Inscrivez-vous au blog
Soyez prévenu par email des prochaines mises à jour
Rejoignez les 31 autres membres